Kit Peralatan OpenVINO™ Pengodean Silang dan Plugin NCS2 Menggunakan Dockerfile Prakonfigurasi untuk OS 32-Bit Debian*
| Catatan |
|
Kit peralatan OpenVINO™ dengan cepat menerapkan aplikasi dan solusi yang meniru visi manusia. Kit peralatan memperluas beban kerja visi komputer (CV) di seluruh perangkat keras Intel® berdasarkan Convolutional Neural Networks (CNN), yang memaksimalkan performa. Langkah-langkah ini secara umum ikuti cara membuat plugin CPU ARM yang tersedia. Namun, perubahan spesifik diperlukan untuk menjalankan semuanya pada Raspberry Pi 4*. Panduan ini memberikan langkah-langkah untuk membangun distribusi sumber terbuka dari kit peralatan OpenVINO™ untuk OS Raspbian* 32-bit dengan metode kompilasi silang.
Klik pada topik untuk detailnya:
Persyaratan sistem
| Catatan | Panduan ini mengasumsikan bahwa Anda menjalankan board Raspberry Pi* Anda dengan sistem operasi yang tercantum di bawah ini. |
Hardware
- Raspberry Pi* 4 (Raspberry Pi* 3 Model B+ harus berfungsi.)
- Setidaknya Kartu microSD 16 GB
- Intel® Neural Compute Stick 2
- Koneksi Internet Ethernet atau jaringan nirkabel yang kompatibel
- Mesin host dengan kontainer docker terpasang
Sistem operasi target
- Raspbian* Buster, 32-bit
Mengatur lingkungan rakit Anda
| Catatan | Panduan ini berisi perintah yang perlu dijalankan sebagai akses root atau sudo untuk menginstal dengan benar. |
Pastikan perangkat lunak perangkat Anda terbarui:
sudo apt update && sudo apt upgrade -y
Menginstal Kontainer Docker
| Catatan | Anda dapat mengikuti instruksi instalasi berdasarkan dokumentasi resmi docker https://docs.docker.com/engine/install |
sudo apt-get install docker-ce docker-ce-cli containerd.io docker-buildx-plugin docker-compose-plugin
sudo groupadd docker
sudo usermod -aG docker ${USER}
sudo systemctl restart docker
Repositor klon openvino_contrib
| Catatan | Versi toolkit openvino_contrib dan OpenVINO untuk artikel ini berdasarkan pada 2022.1 |
Unduh kode sumber dan modifikasi berkas konfigurasi:
git clone --recurse-submodules --single-branch --branch=2022.1 https://github.com/openvinotoolkit/openvino_contrib.git
Buka direktori arm_plugin:
cd openvino_contrib/modules/arm_plugin
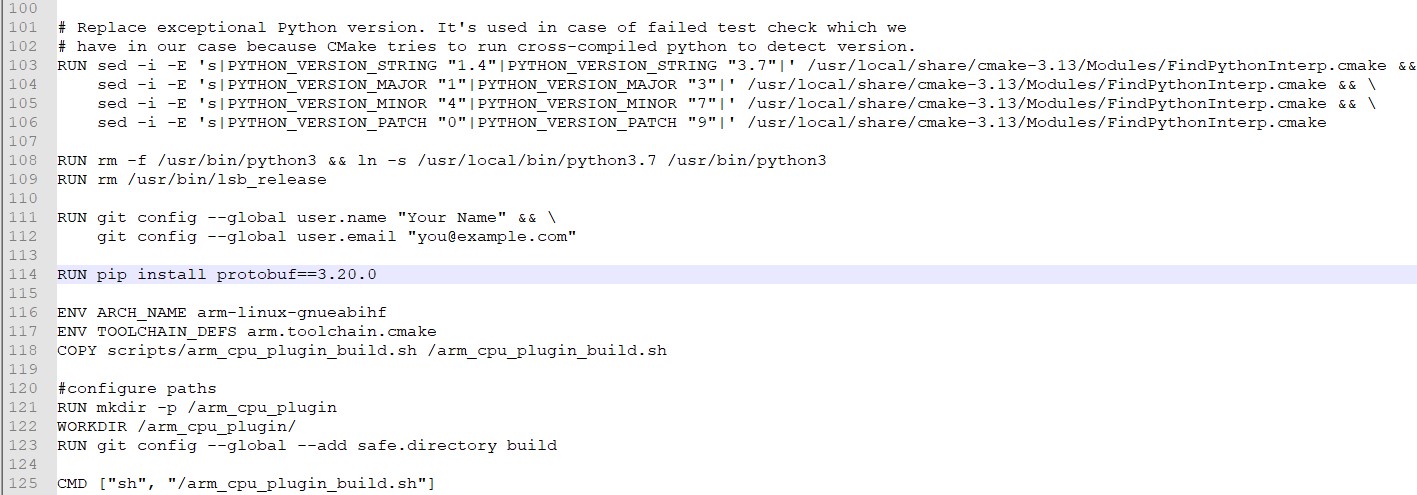
Modifikasi konten file Dockerfile.RPi32_buster seperti di bawah ini dengan alat editor:
vim dockerfiles/Dockerfile.RPi32_buster
Tambahkan "RUN pip install protobuf==3.20.0" pada baris 114, seperti yang ditunjukkan pada diagram di bawah ini.
Simpan file yang diedit.
Modifikasi konten file arm_cpu_plugin_build.sh seperti yang ditunjukkan di bawah ini dengan alat editor:
vim scripts/arm_cpu_plugin_build.sh
Edit baris 77, 78, 79 dan 136 dan tambahkan perubahan seperti yang ditunjukkan dalam huruf tebal di bawah ini:
77 checkSrcTree $OPENCV_HOME https://github.com/opencv/opencv.git 4.5.5-openvino-2022.1 4.x
78 checkSrcTree $OPENVINO_HOME https://github.com/openvinotoolkit/openvino.git 2022.1.0 releases/2022/1
81 checkSrcTree $OMZ_HOME https://github.com/openvinotoolkit/open_model_zoo.git 2022.1.0 releases/2022/1
136 -DENABLE_INTEL_MYRIAD=ON -DCMAKE_BUILD_TYPE=$BUILD_TYPE \
Simpan file yang diedit.
Kit peralatan OpenVINO™ Kompilasi Silang dalam lingkungan kontainer Docker
Pada langkah ini, kami akan menjalankan skrip untuk mengunduh dan mengkompilasi silang OpenVINO™ kit peralatan dan komponen lain seperti OpenCV* dalam lingkungan kontainer Docker:
Buka direktori plugin CPU ARM:
cd openvino_contrib/modules/arm_plugin
Buat gambar Docker*:
docker image build -t arm-plugin -f dockerfiles/Dockerfile.RPi32_buster .
Buat plugin di kontainer Docker*:
Proses build dilakukan dengan /arm_cpu_plugin_build.sh skrip yang dijalankan di dalam direktori /arm_cpu_plugin (perintah kontainer bawaan untuk mengeksekusi). Semua hasil menengah dan artefak build disimpan di dalam direktori kerja.
Sehingga seseorang dapat memasang seluruh direktori kerja untuk mendapatkan semua hasil yang disimpan di luar kontainer:
mkdir build
docker container run --rm -ti -v $PWD/build:/arm_cpu_plugin arm-plugin
| Catatan | Ada beberapa variabel lingkungan yang mengontrol eksekusi skrip /arm_cpu_plugin_build.sh .
|
Dalam folder build , OV_ARM_package.tar.gz dihasilkan
ls build
Transfer OV_ARM_package.tar.gz ke perangkat target (Raspberry Pi 4* 32-bit Buster)
Ada berbagai cara untuk mentransfer paket ke perangkat target (Raspberry Pi 4*), salinan aman langsung ke perangkat target, salin paket ke drive jempol USB dan transfer.
Artikel ini akan menunjukkan cara memasang drive jempol USB di mesin host dan menyalin paket build ke drive ibu jari yang dipasang.
Masukkan USB thumb drive ke port USB sistem, kemudian periksa boot perangkat menggunakan perintah di bawah ini;
sudo fdisk -l
Setelah diverifikasi boot perangkat, pasang boot perangkat (misalnya /dev/sda) ke /mnt;
sudo mount /dev/sda /mnt
Selanjutnya, salin paket OpenVINO ke USB thumb drive;
sudo cp -rf build/OV_ARM_package.tar.gz /mnt/
Memverifikasi paket build
Setelah menyelesaikan kompilasi silang, dan berhasil menyalin OV_ARM_package.tar.gz ke perangkat target (Raspberry Pi 4*).
Instal alat kompilasi
sudo apt update
sudo apt instal cmake -y
Ekstrak OV_ARM_package.tar.gzpackage
mkdir ~/openvino_dist/
tar -xvzf OV_ARM_package.tar.gz -C ~/openvino_dist/
Sumber Variabel Pengaturan
source ~/openvino_dist/setupvars.sh
Mengkompile kode Sampel
cd ~/openvino_dist/samples/cpp
./build_samples.sh
Untuk memverifikasi bahwa kit peralatan dan Intel® Neural Compute Stick 2 serta plugin ARM* bekerja pada perangkat Anda, selesaikan langkah-langkah berikut:
- Jalankan aplikasi sampel hello_query_device untuk mengonfirmasi bahwa semua pustaka dimuat dengan benar.
- Unduh model yang telah dilatih sebelumnya.
- Pilih input untuk jaringan syaraf (yaitu berkas gambar).
- Konfigurasi driver USB Intel® Neural Compute Stick 2 Linux*.
- Jalankan benchmark_app dengan model dan input yang dipilih.
Aplikasi sampel
Kit peralatan Intel® OpenVINO™ mencakup aplikasi sampel yang menggunakan Inference Engine dan Intel® Neural Compute Stick 2. Salah satu aplikasi adalah hello_query_device, yang dapat ditemukan di direktori berikut:
~/inference_engine_cpp_samples_build/armv7l/Release
Jalankan perintah berikut untuk menguji hello_query_device:
cd ~/inference_engine_cpp_samples_build/armv7l/Release
./hello_query_device
Harus mencetak dialog, yang mendeskripsikan perangkat yang tersedia untuk inferensi yang ada pada sistem.
Mengunduh model
Aplikasi memerlukan model untuk menyampaikan masukan. Anda dapat memperoleh model kit peralatan Intel® OpenVINO™ dalam format IR dengan:
- Menggunakan Pengoptimal Model untuk mengonversi model yang ada dari salah satu kerangka kerja yang didukung menjadi format IR untuk Inference Engine. Perhatikan bahwa paket Model Optimizer tidak tersedia untuk Raspberry Pi*.
- Menggunakan alat Pengunduh Model untuk mengunduh dari Open Model Zoo. Hanya model publik yang telah dilatih sebelumnya.
- Unduh file IR langsung dari storage.openvinotookit.org
Untuk tujuan kami, mengunduh secara langsung adalah hal yang paling mudah. Gunakan perintah berikut untuk mengambil model deteksi orang-kendaraan-sepeda:
wget https://storage.openvinotoolkit.org/repositories/open_model_zoo/2022.1/models_bin/3/person-vehicle-bike-detection-crossroad-0078/FP16/person-vehicle-bike-detection-crossroad-0078.bin -O ~/Downloads/person-vehicle-bike-detection-crossroad-0078.bin
wget https://storage.openvinotoolkit.org/repositories/open_model_zoo/2022.1/models_bin/3/person-vehicle-bike-detection-crossroad-0078/FP16/person-vehicle-bike-detection-crossroad-0078.xml -O ~/Downloads/person-vehicle-bike-detection-crossroad-0078.xml
| Catatan | Intel® Neural Compute Stick 2 memerlukan model yang dioptimalkan untuk format titik ambang 16 bit yang dikenal sebagai FP16. Jika berbeda dari contoh, model Anda mungkin memerlukan konversi menggunakan Pengoptimal Model ke FP16 pada mesin terpisah karena Pengoptimal Model tidak didukung pada Raspberry Pi*. |
Input untuk jaringan syaraf
Item terakhir yang diperlukan adalah input untuk jaringan syaraf. Untuk model yang telah kami unduh, Anda memerlukan gambar dengan tiga saluran warna. Unduh file yang diperlukan ke board Anda:
wget https://cdn.pixabay.com/photo/2018/07/06/00/33/person-3519503_960_720.jpg -O ~/Downloads/person.jpg
Mengonfigurasi Driver USB Linux Intel® Neural Compute Stick 2
Beberapa aturan udev harus ditambahkan untuk memungkinkan sistem mengenali Intel® NCS2 perangkat USB.
| Catatan | Jika pengguna saat ini bukan anggota grup pengguna, jalankan perintah berikut dan reboot perangkat Anda. |
sudo usermod -a -G users "$(whoami)"
Mengatur lingkungan OpenVINO™:
source /home/pi/openvino_dist/setupvars.sh
Untuk melakukan inferensi pada Intel® Neural Compute Stick 2, instal aturan USB dengan menjalankan skrip install_NCS_udev_rules.sh :
sh /home/pi/openvino_dist/install_dependencies/install_NCS_udev_rules.sh
Driver USB harus diinstal dengan benar sekarang. Jika Intel® Neural Compute Stick 2 tidak terdeteksi saat menjalankan demo, hidupkan ulang perangkat Anda dan coba lagi.
Menjalankan benchmark_app
Ketika model diunduh, gambar input tersedia, dan Intel® Neural Compute Stick 2 dicolokkan ke port USB, gunakan perintah berikut untuk menjalankan benchmark_app:
cd ~/inference_engine_cpp_samples_build/armv7l/Release
./benchmark_app -i ~/Downloads/person.jpg -m ~/Downloads/person-vehicle-bike-detection-crossroad-0078.xml -d MYRIAD
Ini akan menjalankan aplikasi dengan opsi yang dipilih. Bendera -d memberi tahu program perangkat mana yang digunakan untuk inferensi. Menentukan MYRIAD mengaktifkan plugin MYRIAD , menggunakan Intel® Neural Compute Stick 2. Setelah perintah berhasil dijalankan, terminal akan menampilkan statistik untuk inferensi. Anda juga dapat menggunakan plugin CPU untuk menjalankan inferensi pada CPU ARM perangkat Raspberry Pi 4*Anda, lihat spesifikasi penyetelan operasi plugin ARM* untuk dukungan operasi karena model yang digunakan dalam contoh ini tidak didukung oleh plugin ARM*.
[ INFO ] First inference took 410.75 ms
[Step 11/11] Dumping statistics report
[ INFO ] Count: 388 iterations
[ INFO ] Duration: 60681.72 ms
[ INFO ] Latency:
[ INFO ] Median: 622.99 ms
[ INFO ] Average: 623.40 ms
[ INFO ] Min: 444.03 ms
[ INFO ] Max: 868.18 ms
[ INFO ] Throughput: 6.39 FPS
Jika aplikasi berhasil dijalankan pada Intel® NCS2 Anda, OpenVINO™ kit peralatan dan Intel® Neural Compute Stick 2 diatur dengan benar untuk digunakan pada perangkat Anda.
Variabel lingkungan
Anda harus memperbarui beberapa variabel lingkungan sebelum mengkompirasi dan menjalankan aplikasi kit peralatan OpenVINO. Jalankan skrip berikut untuk mengatur variabel lingkungan sementara:
source /home/pi/openvino_dist/setupvars.sh
**(Opsional)** Variabel lingkungan OpenVINO™ dihapus saat Anda menutup shell. Sebagai opsi, Anda dapat menetapkan variabel lingkungan secara permanen sebagai berikut:
echo "source /home/pi/openvino_dist/setupvars.sh" >> ~/.bashrc
Untuk menguji perubahan Anda, buka terminal baru. Anda akan melihat hal berikut:
[setupvars.sh] OpenVINO environment initialized
Hal ini melengkapi prosedur kompilasi silang dan build untuk distribusi sumber terbuka kit peralatan OpenVINO™ untuk OS Raspbian*, dan penggunaan dengan plugin Intel® Neural Compute Stick 2 dan ARM*.
| Topik terkait |
| Membangun Demo Open Model Zoo pada Raspberry Pi* |
| OpenVINO™ toolkit Open Model Zoo |
| Forum Komunitas dan Dukungan Teknis |